5. Realisasi Hardware Autonomous Buoy
Tahap 1: Perancangan Flow Chart Program
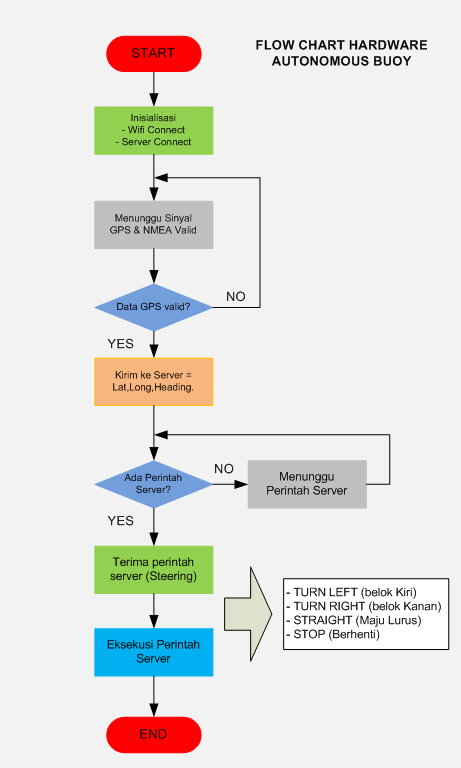
Flow chart program dibuat untuk menggambarkan cara kerja sistem secara keseluruhan. Berikut adalah langkah-langkah kerja sistem:
- Buoy harus ditempatkan di udara terbuka tanpa hambatan dengan antena GPS langsung menghadap ke langit.
- Setelah pertama kali dihidupkan, sistem akan mencari sambungan WiFi dan server.
- Setelah tersambung, sistem akan menunggu sinyal GPS hingga didapatkan sinyal yang valid dari setidaknya 3-4 satelit (waktu sekitar 5-7 menit tergantung kondisi lingkungan).
- Setelah sinyal GPS valid diterima, Buoy akan mengirim data ke server yang terdiri dari: Latitude, Longitude, dan Heading.
- Server harus dalam kondisi aktif dan akan memastikan ketiga Buoy telah mengirimkan data.
- Setelah data diterima, server akan mengirim perintah kepada Buoy2 dan Buoy3 untuk bergerak ke posisi target dengan Buoy1 tetap diam sebagai titik referensi.
- Perintah yang dikirim tergantung pada kalkulasi steering di server, dengan 4 kemungkinan perintah:
- TURN LEFT: Motor kanan berputar, motor kiri diam.
- TURN RIGHT: Motor kanan diam, motor kiri berputar.
- STRAIGHT: Buoy bergerak lurus pada sudut tertentu jika heading telah sesuai dengan course (selisih di bawah 5 derajat).
- STOP: Ketika Latitude dan Longitude mendekati target, server mengirim perintah untuk menghentikan kedua motor.
Dengan sistem ini, formasi segitiga sama sisi dapat tercapai secara otomatis.
Tahap 2: Perancangan Elektronik dan Pemrograman
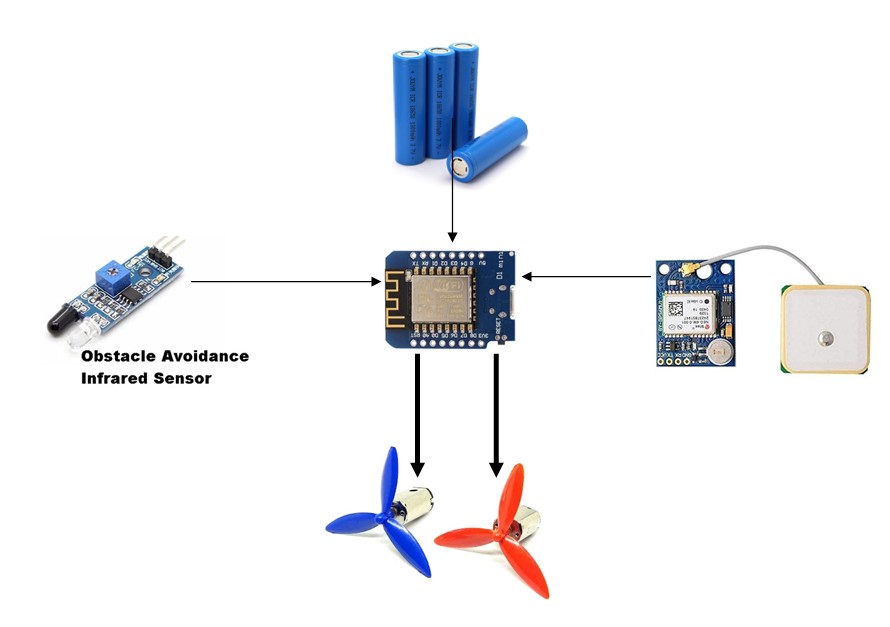
Pada tahap awal, perangkat keras utama disusun dan dirakit dengan komponen sebagai berikut:
- ESP8266: Sebagai unit pemrosesan utama yang mengontrol komunikasi dan pergerakan buoy.
- GPS Neo6M: Untuk menentukan posisi koordinat buoy secara real-time.
- Motor DC dengan propeler (2 unit): Sebagai sistem penggerak utama buoy untuk bergerak dalam air.
- QMC5883:
Sebagai digital kompas yang digunakan untuk membaca heading atau sudut hadap buoy. Data ini penting untuk dikirimkan ke server bersama dengan data GPS latitude dan longitude. Heading sebenarnya dapat diperoleh dari GPS, tetapi membutuhkan waktu tunggu yang lama dan tidak responsif dalam pembaruan datanya. Modul QMC5883 jauh lebih cepat dan lebih efisien dalam memberikan informasi arah buoy secara real-time.
Setelah perakitan selesai, perangkat lunak dikembangkan menggunakan bahasa pemrograman Arduino (C++) untuk mengontrol komunikasi antara buoy dan server. Data posisi dikirim melalui koneksi WiFi ke server, di mana algoritma kontrol posisi akan menentukan pergerakan yang diperlukan untuk membentuk formasi yang diinginkan.
Tahap 3: Desain dan Bentuk Fisik Buoy
Pada tahap ini, pemilihan bentuk buoy menjadi faktor penting untuk memastikan stabilitas dan kemampuan manuver yang optimal.
- Bentuk Setengah Bola: Dipilih karena memberikan stabilitas yang lebih baik dan lebih mudah bermanuver dibandingkan bentuk donat.
- Keunggulan bentuk setengah bola:
- Mengurangi hambatan air saat bergerak.
- Lebih responsif terhadap perubahan arah, sehingga lebih mudah dikontrol.
- Distribusi berat yang lebih stabil dibandingkan bentuk lainnya.
Dalam perancangan ini, fokus utama lebih diarahkan pada pengembangan kontrol elektronik dan perangkat lunak pengendali, sementara desain fisik buoy lebih ditentukan oleh ketersediaan perangkat yang ada di pasaran. Saat ini, tersedia cetakan setengah bola dengan diameter 24 cm, yang dianggap memadai untuk menempatkan perangkat elektronik kontrol dan memiliki variasi warna yang banyak yang bisa digunakan untuk mengidentifikasi Buoy dari jarak jauh
Setelah desain buoy dikembangkan, pengujian dilakukan untuk memastikan bahwa buoy dapat bergerak secara mandiri dan mengikuti algoritma formasi yang telah ditentukan.
Pengujian Manual per-unit Buoy dapat dilakukan melalui web:
Test Page
Pengujian Formation Control dapat dipantau melalui web:
Formation Control Monitor